MagAlpha 磁性角度传感器系列产品简介
介绍
在众多的机械系统中,检测位置/速度能力已经成为系统控制和监控的一项基本要求。在低速位置测量应用中,如电机驱动通常会使用电阻电位器。而在高速应用中,如伺服电机则常使用光电编码器。
其中,电位器价格优惠,但作为基于移动触点元件,它们的缺点也显而易见:易遭受机械接触磨损、易受外部环境因素损坏(包括湿气和污垢侵入)。光电编码器精度高,但由于其结构的复杂性,因此价位也相当高。面对这样的窘境,其实工程师还可以选择非接触式旋转磁性角度传感器(MagAlpha系列产品)来解决这一难题。
MagAlpha 系列传感器优势明显:
- 8-14b位角度输出,同时具备 SPI/ABZ/PWM/UVW 多种输出接口可选
- 非接触式磁性传感可靠性高,使用寿命长
- 成本低,封装尺寸小
- 支持灵活的同轴、偏轴和侧轴摆放
MPS MagAlpha 传感器中使用了一组垂直霍尔阵列,用来测量磁场的水平矢量。这种磁场通常来自位于传感器上方或侧面的一对径向磁化的磁极。MagAlpha 霍尔阵列的这种传感技术支持多种磁铁-传感器摆放位置(见图1)。

图 1:支持同轴和侧轴拓扑
传感器前端包含一个面向各个方向的专有霍尔元件阵列。该阵列以高速(每1μs)连续采样并产生近似正弦的内部信号波形。该波形过零点处的相位角直接与被测角度相关。在每个测量周期开始后,使用快速数字计数器测量过零点的相位,这个值直接反映了每个测量角度的大小。图 2 展出了典型采样波形图。计数器得到的值被传递到低延迟数字滤波模块,由该模块负责均衡噪声和提高传感器的输出分辨率。根据不同滤波器深度,分辨率最高可达14位(3-sigma)。
MPS将这种独有的“相位到数字”的技术称为SpinAxisTM。它与传统的X-Y霍尔模块和反正切计算技术有所不同。传统基于反正切的算法具有数百微秒的延迟,会导致更大的角度滞后(测量的角度与实际机械角度)。而MagAlpha前端的快速采样率和数字滤波器的低延迟设计,从前端捕获到的输出接口可用角度信息的角度滞后通常仅为10μs。
这使得MagAlpha传感器在非常高的转速下依然能够捕获低延时的角度。由于延迟固定在大约10μs,因此恒定转速下的滞后角度仅为10μs×(以度/秒为单位)。例如,转速在50,000rpm时,从采集到输出的角度滞后为每秒300,000度×10μs= 3度。
与竞争对手的磁性解决方案相比,SpinAxisTM技术还支持更广泛的磁场强度,例如使用总磁阻(GMR)或各向异性磁阻(AMR)材料的磁解决方案。MagAlpha传感器可支持的场强范围为15mT到100mT以上。这样,磁材料的选择以及磁体至传感器的定位设计变得更加灵活。

图 2:SpinAxisTM 技术
数字滤波模块
数字滤波模块针对每个不同的MagAlpha传感器类型都进行了优化,得以更好地匹配目标应用。滤波器的滤波深度(处理的样本数量与时间的关系)会影响传感器的最终输出分辨率,滤波器深度越大(样本越多),分辨率越高。
更深的滤波器深度会导致滤波器分辨率增加而带宽降低(因为处理更多样本需要更长的时间)。同样,随着带宽减小,滤波器的时间常数也会增加。这将影响整个系统环路的响应时间,同时也决定了传感器在具有动态角度变化或旋转速度变化的系统中的性能。MagAlpha系列的滤波器时间常数(tau)范围为1ms至16ms。该值可用于计算加速或减速期间产生的角度滞后误差。速度变化下的角度滞后误差等于单位为度/每秒2(即加速度/减速度)乘以tau值的平方。后期文章将深入探讨这种效应以及如何为应用程序选择合适的带宽。
传感器系列产品
基于不同的应用,我们已经研发了几款具有不同性能和输出接口类型的MagAlpha产品。所有的MagAlpha传感器都可以通过SPI总线输出数字角度值,在某些设备中也可以通过SSI输出。此外,特定的型号还提供了增量正交ABZ编码器输出,PWM输出或UVW换向信号,用于电机控制。其他性能包括可以设置磁场检测的阀值用于磁铁位置检测和磁场强度检测,提供了用于改善侧装模式下输出线性化的寄存器以及零角度位置的设置。
改善侧装线性化特性允许传感器调整霍尔阵列在X或Y轴上的增益,以补偿此模式中存在的磁场矢量不平等现象,并重新获得线性输出响应。零角度位置调整意味着不需要手动调整磁极对准传感器的方向,可以在软件中调整偏移以获得所需的零角度位置。所有可编程功能都可以存储在非易失性片上EEPROM存储器中。每次开机后都会自动加载这些设置。图 3 展示了 MagAlpha 传感器的通用功能框图。
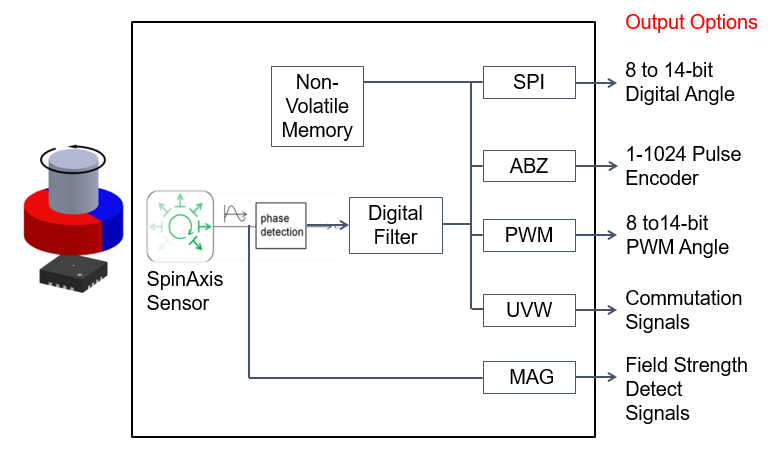
图 3:MagAlpha 通用功能框图
下表列出了所有MagAlpha系列产品:
|
适用于驱动器、制动器等的通用型角度编码器 |
MA704 |
10位,高带宽(3kHz)-适用于动态闭环控制应用 |
|
位置/速度控制 |
MA702 |
12位,中带宽(390Hz)-适用于通用型控制应用 |
|
|
MA710 |
12位,低磁场、低带宽(90Hz)-侧轴安装模式/低磁场应用的理想之选 |
|
|
MA730 |
14位,低带宽(23Hz)-适用于高分辨率、低速应用 |
|
|
MA732 |
9-14位,可配置滤波器带宽-可根据应用进行调节 |
|
|
|
|
|
用于直流无刷电机(UVW 输出)的通用型角度编码器 |
MA302 |
与MA702相同,但采用适用于无刷电机、伺服电机和驱动器的UVW换向信号 |
|
用于伺服电机和驱动器 |
MA301 |
与MA710相同,但采用适用于无刷电机的UVW换向信号,是侧轴/低磁场应用的理想之选 |
|
|
MA330 |
9-14位,可配置滤波器带宽,适用于无刷电机,可根据应用、UVW调节带宽 |
|
|
|
|
|
可替代直流无刷电机换向应用中的3个霍尔开关 |
MA102 |
UVW 输出接口,具有1-8极对仿真功能 |
|
|
|
|
|
适用于低功率应用 |
MA780 |
8-12位,自动采样环路,采用3mmx3mm QFN封装 |
|
|
MA781 | 8-12位,自动采样环路,采用2mmx2mm QFN封装 |
|
|
|
|
|
人机交互界面,速度<200rpm |
MA800 |
8位,SPI输出接口 |
|
|
MA820 |
8位,SPI输出接口,每圈64脉冲的ABZ |
|
|
MA850 |
8位,SPI和PWM输出接口 |
Ma7xx 系列产品具有9-14位SPI输出分辨率,同时具备SSI、ABZ和PWM多种输出接口。此系列产品适用于任一款通用型角度/速度传感应用,包括驱动器、编码器和磁场定向电机控制(FOC)应用。该系列最新产品MA732可以允许用户编程数字滤波器的参数,如分辨率,时间常数和启动时间等,还具有可调节的ABZ迟滞功能。
MA780和MA781适应于平均功耗低的应用,比如电池供电设备。这两款芯片可以在休眠、唤醒和采样三种模式之间进行自动切换以实现低功率模式。Ma780采用3mmx3mm QFN封装,MA781则采用小尺寸2mmx2mm QFN封装。
Ma3xx 系列产品具有9-14位SPI输出分辨率,同时具备ABZ和UVW两种输出接口。UVW接口可以取代许多三相无刷电机中三个独立霍尔传感器产生的电机换向信号。通过使用一对简单的磁极,MA3xx系列能够模拟三个霍尔传感器的波形,并产生UVW输出,支持具有1至8对极的转子。
将SPI角度或ABZ编码器输出与UVW换向相结合,可实现非常紧凑的无刷伺服电机解决方案。这对于小尺寸微型电机来说非常有用,因为不可能在微型电机的定子绕组中嵌入三个霍尔开关。
MA330允许对数字滤波器参数进行编程来优化伺服电机控制中的环路带宽,以及可调节的ABZ迟滞,以支持给定分辨率设置下更高的每匝数脉冲数。
对于仅需替代3个霍尔传感器的非伺服应用,MA102是一款仅提供UVW信号的最小解决方案。它具有互补的输出极性,可以从传感器接线器返回电机控制器,从而获得更高的信噪比性能。
针对汽车应用,MAQ470和MAQ430分别作为MA702和MA302 12位角度传感器的AECQ Grade-1版本。这两款产品能够在-40°C至+ 125°C温度内工作,适用于车辆应用中的驾驶室和车身传感电子设备。典型应用包括信息娱乐控制、HVAC襟翼角度控制和弹出门把手。
最后,针对简单的旋转用户界面应用,性价比高的8位MA8xx系列产品可代替机械旋转开关或电位器。它们还具有MagAlpha磁场阈值检测功能,可以在旋钮设计中实现按钮动作。
所有MagAlpha传感器均采用节省空间的3mmx3mm QFN封装(除了MA781采用2mmx2mm QFN封装),采用3.3V电源供电。电流消耗通常在10mA至13mA范围内,新品低功率产品MA780和MA781可实现微安级的平均电流。
更多关于MagAlpha传感器系列产品的信息,请浏览 https://www.monolithicpower.com/en/products/sensors/position-sensors.html
关于MagAlpha系列的下一篇文章将讨论如何通过数字滤波器操作确定输出分辨率,以及不同的滤波器带宽对角度滞后的影响。
___________________________
直接登录
创建新帐号