Power Management Challenges in Autonomous Driving
As the technology behind autonomous driving continues to progress, the function of power electronics and management will become increasingly important. The advanced technologies that enable autonomous driving have their own set of issues when it comes to power management, which differentiates them from conventional vehicle systems.
Increased Power Consumption of Sensors and Computing Systems
When it comes to gathering information about their surroundings, autonomous vehicles rely on a wide variety of sensors, ranging from Lidar technologies to ultrasonic systems. Every single sensor requires power, and when the total number of sensors on a single vehicle is multiplied by the number of sensors, the entire power consumption can be rather large.
In addition, the data that these sensors collect is processed in real time by powerful computing systems that are located onboard. The fact that these systems need to analyze terabytes of data per hour makes high-performance CPUs very necessary. Despite the fact that they are efficient in terms of their processing ability, these processors require a large amount of power.
Furthermore, the continual running of these systems, even when the vehicle is parked (for example, at a traffic signal), contributes further to the overall power consumption of the vehicle. Numerous autonomous systems continue to be active, continuously scanning and processing information, in contrast to traditional vehicles, which have a tendency to let many of their systems lie dormant when the vehicle is not being used.
Reliability and Safety Requirements
The reliability of an autonomous vehicle is not merely a performance parameter; rather, it is a concern for both safety and performance. The power systems in these cars need to be extremely dependable in order to function properly. Any interruption of power could result in a malfunction of the sensor or processor, which would put the safety of the people within the car as well as other people on the road in jeopardy.
As a result of the desire for high reliability, there has been an increased emphasis placed on stable power backup systems, which frequently necessitate twin or even triple redundancies. Because of this, in the event that one of the systems fails, the backup systems will be able to take over immediately and without any interruptions.
Additionally, safety standards necessitate that power systems are able to withstand abrupt high-load demands without experiencing any disruptions. In the event of an emergency, for instance, the vehicle might require access to additional computational power in order to make decisions or activate multiple systems at the same time. For instance, when an autonomous vehicle detects an impending collision, it might need to immediately activate its braking systems, steering adjustments, and various sensors in order to avoid the obstacle. This demands a fast increase in computational power in order to process the data from LiDAR, radar, and cameras while simultaneously engaging mechanical systems like brakes and steering actuators. This must be done without any delay or power shortage.
Furthermore, the power electronics themselves need to be resistant to external variables such as variations in temperature, vibrations, and electromagnetic interference. This can be a particularly difficult task to accomplish considering the limited space and weight constraints that current cars are subject to.
In conclusion, the very technology that makes it feasible for autonomous vehicles to operate also creates complex issues in terms of power management. A novel engineering solution that strikes a balance between performance, safety, and efficiency is required in order to address these issues. In order to guarantee the dependable and secure operation of these cutting-edge systems, power electronics will play an increasingly important role as the automotive industry continues its march towards completely autonomous vehicles.




Power Management Solutions for Autonomous Vehicles
It is challenging to develop technology for autonomous vehicles because it requires the processing of huge amounts of data that are collected by sensors (such as cameras, LiDAR, radar, and ultrasound). In addition to this, it is required to offer feedback in real time, which may include information about the weather, events, traffic conditions, road signs, and traffic signals, among other things. In order to handle several demanding tasks simultaneously, such as object extraction, identification, segmentation, tracking, and other similar activities, this requires a high number of trillions of operations per second (TOPS).
The amount of power that it uses is likewise quite considerable, depending on the particular operation. In conclusion, high-speed processing, reliability, and precision are aspects that are extremely significant and should be superior to those of people.
Energy-Efficient Computing Architectures
When it comes to processing massive volumes of data in real time, autonomous vehicles primarily rely on the computing systems that are built into their vehicles. Although traditional computing architectures are strong, it is possible that they are not the most energy-efficient for the tasks that are being performed here.
Modern architectures that are economical in terms of energy consumption are adapted to meet the specific computing requirements of autonomous driving. These architectures may make use of specialized hardware accelerators, custom silicon designs, or heterogeneous computing, which is a kind of computing in which one type of processor (such as a central processing unit, a graphics processing unit, or a field-programmable gate array) is assigned to a specific purpose. After taking these steps, the computing system will be able to attain higher performance per watt, which will result in significant savings on energy use.
Further energy conservation and a reduction in thermal output are achieved by the utilisation of advanced power gating techniques. These techniques allow for some areas of the chip to be shut off when they are not being used.
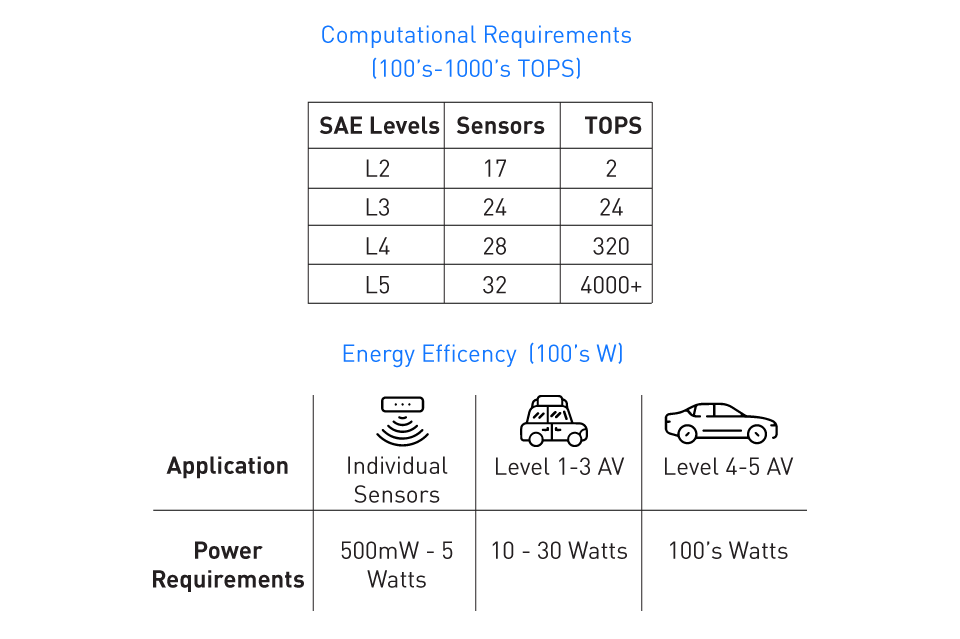
Figure 1: Scaling of Computational and Power Requirements in Autonomous Driving
Redundancy and Fail-Safe Systems
Redundancy is of the utmost relevance in the context of autonomous cars, given the crucial importance of continuous power to the operation and safety of these vehicles. To ensure that a malfunction in one system does not result in the breakdown of the entire system, these vehicles frequently make use of a number of different power sources and circuits that are independent of one another.
For instance, important sensors might have two power feeds, which guarantees that they will continue to function even in the event that one of their power sources fails. It is also possible for important computing systems to be equipped with backup batteries that are able to supply power immediately in the event that there is a disruption.
These automobiles, in addition to having redundant components, also have fail-safe devices. It is possible for the system to enter a "safe mode" in the event that certain malfunctions occur. This mode allows the vehicle to slow down or safely pull over while ensuring that all of the key safety systems continue to function normally.
It is impossible to overstate the significance of having power management systems that are both reliable and effective as the number of autonomous vehicles continues to rapidly increase. The industry is continuously evolving in order to face the challenges that are provided by these highly sophisticated cars. Redundancy, adaptive power regulation, and computer architecture are some of the advances that are being implemented. The end goal is crystal clear: to provide a driving experience that is not only safe and frictionless but also efficient in terms of energy consumption.
Case Studies and Real-World Implementations
Applications in the real world offer a realistic perspective through which theoretical answers can be evaluated. The power management techniques of autonomous vehicles may be observed in action, which sheds light on the accomplishments and pitfalls of the many approaches that are now in use. This section examines a few noteworthy implementations and draws insights from those implementations.
Examples of Power Management in Current Autonomous Vehicles
Waymo's Custom Computers: Waymo, which is owned by Alphabet, uses computers that are created specifically for its autonomous vehicles with the purpose of maximizing power efficiency. Because the system is able to interpret sensor data and make judgments regarding driving with very low latency, it ensures that it is responsive in real time. In light of the fact that the system dynamically adjusts its consumption in response to the needs of computation, adaptive power regulation is clearly visible.
Lessons Learned and Best Practices
Scalability is Crucial: As Waymo's fleet expanded and its software became more sophisticated, the business came to realize that scalable power management solutions were essential. When it comes to power consumption, systems need to be able to handle more complicated tasks without experiencing linear increases. Waymo is currently working to develop energy optimization algorithms that intelligently balance performance and power consumption. This will ensure that the processes that require the most energy are only activated when they are absolutely required to do so.
In addition, they are making investments in hardware of the next generation that has greater power efficiency in order to lessen the overall energy footprint that their autonomous systems leave behind. This method involves the creation of specialized hardware components that are designed to carry out particular functions more effectively than general-purpose components, thereby reducing the amount of power wasted on operations that are not necessary.
Continuous Learning and Iteration: A philosophy of constant learning and iteration is something that manufacturers need to adopt in order to keep up with the rapid advancements that are being made in both autonomous driving and power electronics. The things that are effective right now might be out of date in a few years. System reviews and changes should be performed on a regular basis.
It may be concluded that the real-world applications of power management in autonomous vehicles are not only diverse but also instructive. In doing so, they shed light on the significance of holistic design, the requirement of scalability, the indisputable nature of redundancy, and the requirement for ongoing innovation. These lessons and best practices will serve as solid pillars for future breakthroughs in the field of autonomous vehicles, which are becoming closer and closer to being adopted by the general public.
直接登录
创建新帐号