Introduction to Automotive Bus Systems
At the heart of modern vehicle networking, automotive bus systems play a central role in coordinating a complex communication network among different electronic components within a vehicle. In automotive bus systems, grasping their significance and the push for standardization establishes the foundation for comprehending the intricacy and capabilities of contemporary vehicles.
Role of Bus Systems in Automotive Networking
In automotive networking, the bus systems are considered the spinal cord of a vehicle’s nervous system, guaranteeing successful communication among different subsystems and equipment.
Facilitating Communication: The transmission of data between numerous Electronic Control Units (ECUs), actuators, sensors, and other components is provided by bus systems. From airbag deployment, engine management, to infotainment control, bus systems build an environment where equipment can ‘talk’ to each other.
Cost-Effectiveness: Bus systems lessen the need for extensive wiring harnesses by letting different devices communicate over a single or a few physical paths, eventually resulting in both weight and cost-cutting.
Real-Time Data Exchange: Immediate responses, such as anti-locking braking systems are frequently required by automotive applications. To ensure timely actions, bus systems handle real-time data exchange.
Fault Diagnosis and Management: By means of bus systems, diagnostic devices gain access to diverse vehicle subsystems, streamlining the troubleshooting and repair procedures.
Scalability and Flexibility: Modern bus systems are flexible enough to incorporate advanced technologies or upgrade current functionalities without redesigning the electronic architecture of the entire vehicle.
Standardization in Automotive Bus Systems
Standardization became a critical requirement to guarantee interoperability, efficiency, and compatibility across different manufacturers and suppliers, along with the proliferation of electronic systems in vehicles.
Uniform Communication Protocols: Despite the manufacturer, standardization make sure that various elements follow uniform rules for communication. It assists in simplifying integration, that makes design, development, maintenance of automotive networks easier.
Interoperability: Various manufacturers’ elements can communicate seamlessly by following the standards. For instance, communication of multiple suppliers without compatibility challenges is enabled by standardized CAN protocol.
Fostering Innovation: Standardization frequently results in the establishment of open standards, which foster innovation by setting an equitable environment for new participants and diminishing obstacles to entering the market.
Regulatory Compliance: In automotive bus systems, standardization is not only advantageous but also mandatory in many jurisdictions. In order to align with safety, environmental, and other regulatory needs, adherence to standards is crucial.
Facilitating Global Trade: Without making any necessary changes in vehicles, global standards allow manufacturers to sell them. For boosting cross-border trade, it aligns products with international norms.
Vehicle design, manufacturing, and functionality are revolutionized with the introduction of automotive bus systems. Their role in modern vehicle coordination and efficiency is irreplaceable, and their importance continues to expand as electronics become increasingly integrated into automotive applications. Also, in automotive bus systems, standardization has emerged as a crucial enabler to elevate innovation, compliance, interoperability, and global trade. Bus systems uplifts the complex knowledge of communication that acts as a foundation to any in-depth exploration of modern automotive technology. Moreover, it acts as an entry point for exploring the intricacies of particular bus protocols and applications that influence the vehicles of both today and the future.




Controller Area Network (CAN)
In automotive networking technology, the Controller Area Network (CAN) represents a milestone. It has become one of the most adopted networking protocols in modern vehicles that are engineered with flexibility and robustness. This section delves into the fundamental principles and defining features of CAN, examining its practical uses and constraints while briefly touching upon contemporary alternatives.
Basics and Characteristics of CAN
Within vehicles, CAN is a serial communication bus designed for efficient communication and robustness between devices, frequently called nodes. Any device can transfer data to others on the network, which means CAN functions on a multi-master broadcast serial bus standard.
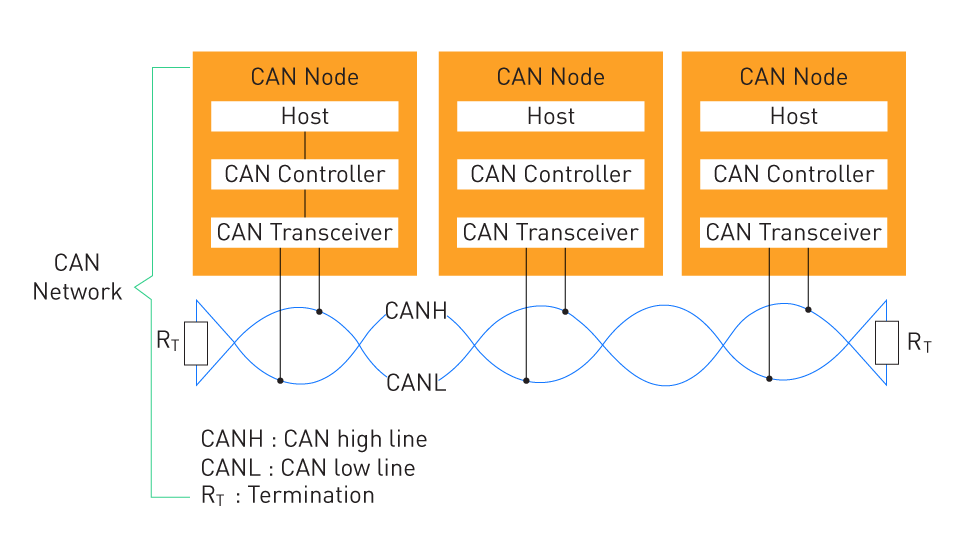
Figure 1: CAN Network Architecture
The host microcontroller, the CAN transceiver, and the CAN controller are included in a CAN node. An internal periphery of the microcontroller is usually the CAN controller. Terminating resistors serves the essential role of completing the circuit between the two signal lines and mitigating potential reflections on the line. The standard bus voltage typically operates at 5V, and the signals are organized into either shielded or unshielded twisted pairs.
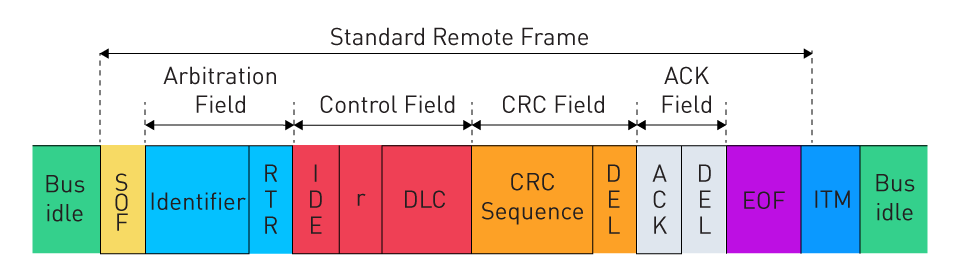
Figure 2: Typical CAN Frame
Data Rate: At speeds up to 1 Mbps, standard CAN tranfers data. Newer iterations such as CAN FD (Flexible Data-Rate) helps in attaining higher data rates.
Error Handling: To ensure strong communication even in electrically noisy environments, CAN has vast error detection and correction characteristics like CRC (Cyclic Redundancy Check), message acknowledgement, and bit stuffing.
Priority Managementt: CAN messages are prioritized with their IDs. Achieving prioritization in message transmission is made possible via the arbitration process, where messages with lower ID numbers are given higher priority, ensuring the early transmission of critical messages.
Security: Although CAN is not inherently secure, it can be fortified with security protocols to bolster its level of protection.
Standardization: To ensure consistent implementation across manufacturers, CAN is standardized in ISO 11898.
Use Cases and Applications of CAN in Vehicles
CAN is ideal for a huge range of applications due to its flexible and reliable nature:
Powertrain Control: Engine, transmission, and other related elements are coordinated.
Chassis Control: Systems such as traction control, ABS, and airbag systems are integrated.
Infotainment Systems: Multimedia devices, navigation, and entertainment within the vehicle are managed.
Diagnostic Tools: Real-time diagnosis of a vehicle’s potential issues and performance can be easily done.
Telematics: Vehicle-to-infrastructure (V2I) and vehicle-to-vehicle (V2V) communication are possible.
Fleet Management: Centralized control and monitoring are enabled for a fleet of vehicles.
Limitations and Modern Alternatives to CAN
CAN has some limitations, even with its widespread use:
Limited Data Rate: Contemporary applications need high-speed data transfer higher than 1 Mbit/s. Hence, traditional CAN’s data rate is not sufficient for them.
Lack of Security: To ensure secure communication, security features should be added externally that lead to complications.
Complexity in Large Networks: Managing communication between multiple nodes can become complicated with the growing network. The bus load rate must not surpass an average of 50%, indicating a stringent physical constraint on the maximum number of nodes that can be connected to the bus while ensuring reliable operation.
Modern Alternatives
CAN FD: CAN FD is an extension of CAN that enables higher data rates and larger data fields. Different data rates and arbitrary lengths can be taken by the control field in the CAN FD, allowing more flexibility.
Automotive Ethernet: Although automotive ethernet is expensive, it emerges as an alternative for applications requiring even greater data and strong security.
FlexRay: FlexRay offers deterministic communication and greater bandwidth, hence used in safety-critical applications.
In automotive networking, the Controller Area Network (CAN) stands as a testimony. From handling powertrains to infotainment systems, its features make it ideal for a wide range of applications within a vehicle. Although exceptionally versatile and dependable, the progression of automotive technology has revealed certain constraints within the Controller Area Network (CAN), leading to the emergence of contemporary alternatives. Comprehending CAN, including its practical uses, constraints, and the evolving dynamics that influence its future, is essential for gaining insight into the interconnected landscape of contemporary automotive systems.
Local Interconnect Network (LIN)
A crucial component of automotive communication systems I.e., the Local Interconnect Network (LIN) is frequently used along with other technologies such as the Controller Area Network (CAN). LIN is a cost-efficient and simple communication protocol, that finds certain value in automotive subsystems where the robustness and pace of CAN are not needed. In this section, we will explain the basics and features of LIN and its integration with CAN.
Basics and Characteristics of LIN
For communication between vehicle elements, LIN (a serial network protocol) is utilized. Within the automotive environment, it is considered for low-cost and low-speed applications.
Master-Slave Architecture: LIN utilizes a master-slave architecture in which a single master governs the communication while multiple slaves provide responses.
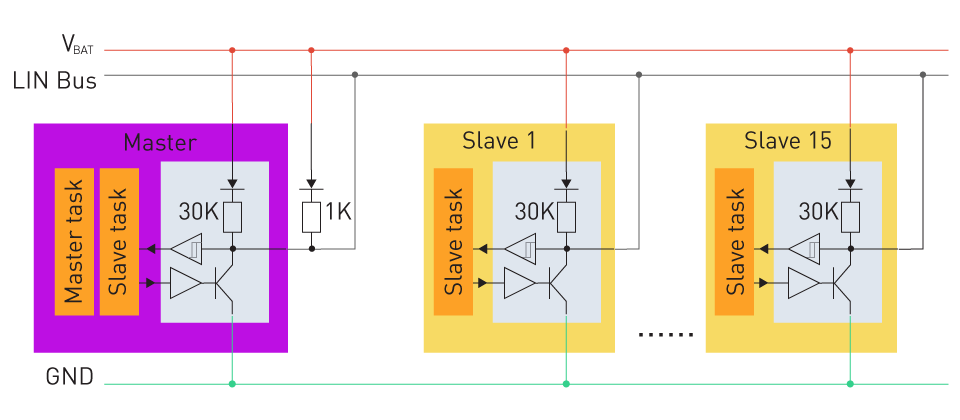
Figure 3: LIN Network Architecture
Like CAN, LIN has a LIN controller, a host microcontroller, and a LIN transceiver. LIN typically operates as a signal derived from the battery, with each node featuring a pull-up resistor connected to the battery and an open-collector switch capable of lowering down the LIN signal. A recessive level corresponds to any level exceeding 60% of Vbat, while a dominant level is defined as any level falling below 40% of Vbat. A typical LIN frame comprises two segments as LIN works in a master-slave protocol. Initially, the master initiates communication by polling the slave, followed by the slave providing its response.
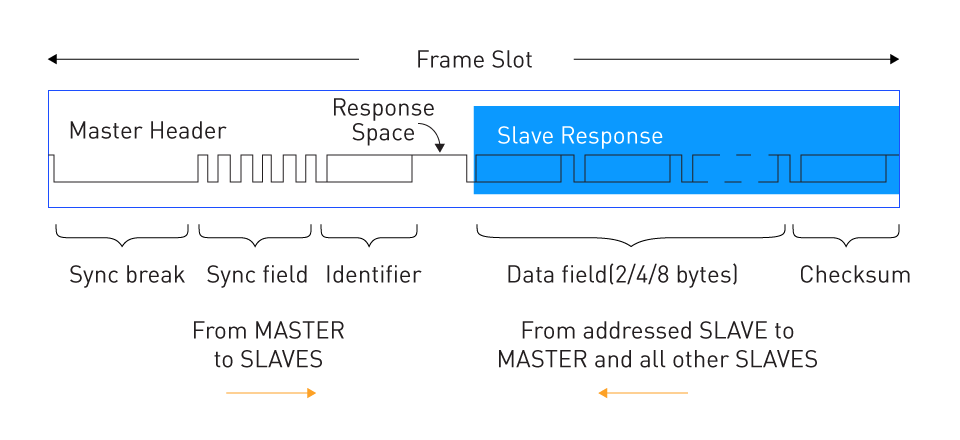
Figure 4: Typical LIN Frame
LIN is intentionally engineered to withstand various battery supply fluctuations, including cold-cranking and micro-interruptions.
Data Rate: In contrast to CAN, LIN is specifically engineered for more slower data transmission, typically operating at data rates of approximately 19.2 kbps.
Single Wire Communication: To reduce the cost and complexity, LIN uses a single signal wire. The ground is the return of the signal.
Deterministic Communication: LIN schedule makes predictable communication by defining the exact time each message is transmitted.
Error Detection: Although LIN lacks extensive error handling capabilities like in CAN, it still offers basic error detection such as CRC (Cyclic Redundancy Check, or Checksum).
Sleep Mode: LIN features a low-power sleep mode that facilitates energy conservation when communication is unnecessary. This capability is particularly crucial for reducing battery drain since LIN operates directly from the battery's power source.
Standardization: LIN adheres to the ISO-17897 standard established by the LIN Consortium, fostering interoperability across various vendors.
Integration of LIN with CAN
To utilize the strong points of both protocols, the integration of LIN with CAN inside an ECU is a common practice in automotive design:
Hierarchical Networking: LIN manages less critical functions such as window or seat controls. Meanwhile, CAN, renowned for its strong error-handling capabilities and enhanced speed, is frequently employed in vital systems like engine control. This hierarchical approach enhances cost-efficiency and overall performance.
Gateway Function: The LIN master frequently connects to the CAN network, acting as a gateway in a combined CAN-LIN system and enabling data exchange between LIN and CAN networks.
Cost-Effective Solution: Through the integration of both CAN and LIN, manufacturers can guarantee strong, high-speed communication for critical components (utilizing CAN), while also deploying a cost-effective solution for less critical subsystems (employing LIN).
Simplified Design: The incorporation enables a more efficient design by harnessing LIN for basic peripherals, thereby simplifying wiring and control intricacies.
Enhanced Functionality: To elevate overall functionality, such as advanced climate control systems or adaptive lighting, some systems may leverage both CAN and LIN.
For low-cost, low-speed automotive applications, the Local Interconnect Network (LIN) is a crucial protocol. Within the automotive environment, LIN provides an attractive solution for many subsystems with its unique features and efficient design. Moreover, an imperative role in the design and operation of modern vehicles is played by LIN and CAN integration, which offers an elegant, cost-effective, and functionally rich networking approach. Gaining insight into LIN, both as a standalone system and in conjunction with CAN, is essential for understanding the intricate dynamics and advancements that define modern automotive networking.
FlexRay
To fulfill the meticulous demands of advanced vehicles’ complicated real-time and safety-critical applications, FlexRay, an automotive network communications protocol is developed. This high-speed and deterministic network, presents innovations that bridge the gaps separating the conventional CAN and LIN protocols. In this section, we will explain FlexRay, its benefits over LIN and CAN, and its applications in modern vehicles.
Introduction to FlexRay
To address the restrictions of CAN and LIN in managing the reliability needs and rising data rates of advanced automotive systems, FlexRay was developed. Its architecture is designed to promote both dual-channel operation, enhancing fault tolerance, and single-channel operation to optimize costs. Just like CAN, FlexRay utilizes a differential bus configuration with terminating resistors at both ends. In a Line topology, the FlexRay standard ISO-17485 recommends a maximum of 22 nodes.
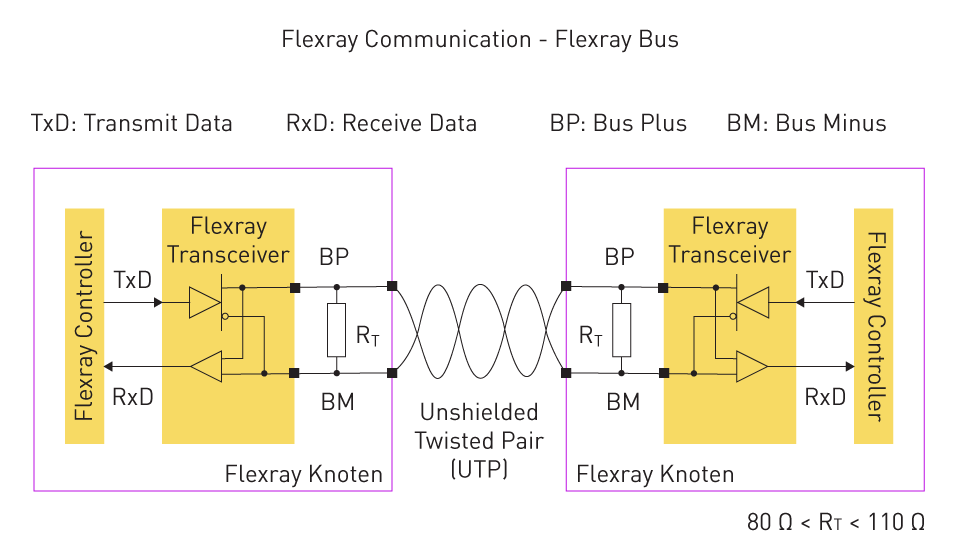
Figure 5: FlexRay Network (Single-Channel Architecture)
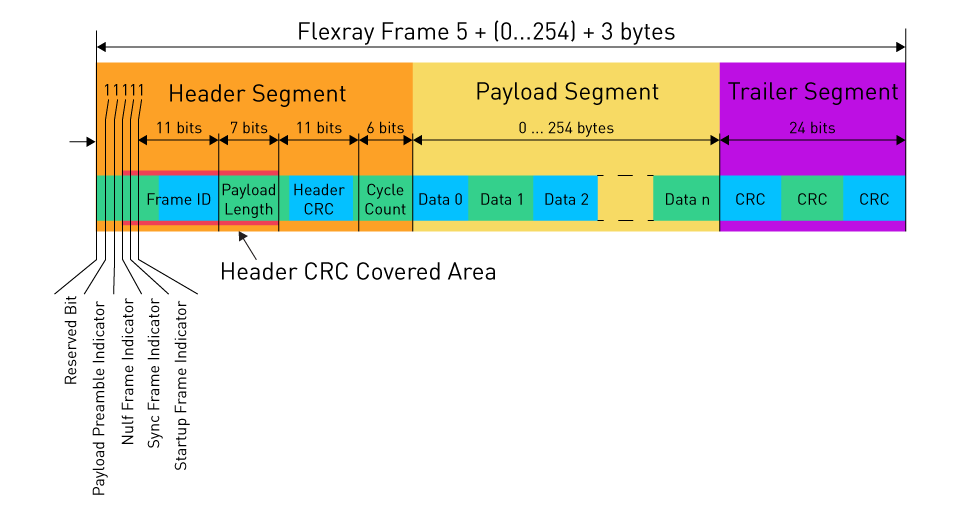
Figure 6: Typical FlexRay Frame
Communication Method: The system employs both Time-Triggered (TT) and Event-Triggered (ET) communication methods. In the Time-Triggered mode, data communication is organized into TDMA rounds, with each round consisting of slots. Each node is allocated one sending slot and is required to transmit frames in each round. On the other hand, the Event-Triggered mode allows a sender to transmit a message whenever a significant event occurs, such as the termination of a task or an interrupt signal. This dual approach makes the system well-suited for hard real-time applications.
Data Rate: FlexRay provides significantly greater speeds compared to CAN and LIN with data rates of up to 10 Mbps.
Determinism and Flexibility: To accommodate sporadic and dynamic data, FlexRay provides a highly deterministic system while offering flexibility.
Synchronization: To ensure simultaneous transmission of time-triggered messages, nodes in a FlexRay network are synchronized.
Error Handling: As compared to CAN, FlexRay has more advanced error detection and fault confinement procedures, guaranteeing higher robustness. For instance, in one single frame, it deploys various CRC codes.
Advantages of FlexRay Over CAN and LIN
Higher Data Rates: FlexRay is suitable for handling data-intensive applications as its 10 Mbps greatly exceeds the CAN's maximum of 1 Mbps and LIN's 19.2 kbps.
Enhanced Reliability: To enhance fault tolerance, dual-channel architecture offers redundancy.
Real-time Performance: Time-triggered communication is a crucial requirement for safety-critical applications that ensures exceptionally reliable data transmission.
Integration Capability: It has the capability to be seamlessly integrated with CAN and LIN; thereby, establishing a hierarchical communication system.
Applications of FlexRay in Modern Vehicles
Chassis Control: FlexRay is utilized for real-time data processing in chassis control systems such as adaptive cruise control.
Powertrain Systems: FlexRay ensures the coordinated management of various elements in modern electric and hybrid vehicles.
Steer-by-Wire and Brake-by-Wire: FlexRay is ideal for safety-critical applications such as brake-by-wire and steer-by-wire systems due to its robustness and real-time capability.
Integration with Other Protocols: To link CAN and LIN networks within a vehicle, FlexRay frequently serves as a high-speed central infrastructure.
Advanced Driver-Assistance Systems (ADAS): FlexRay acts as a foundation for ADAS capabilities and facilitates functions such as automatic emergency braking, lane departure warning, etc.
By offering determinism, high speed, and flexibility, FlexRay comes out as a main protocol in automotive networking that bridges the limitation gap of CAN and LIN. The essential role it plays in the continuous evolution of the automotive industry is highlighted by its widespread use in safety-critical systems. As vehicles become increasingly complex, with a growing focus on real-time control and interconnectivity, FlexRay is poised to establish itself as a fundamental technology in shaping the future of automotive design and engineering.
Automotive Ethernet
In the realm of in-vehicle networking, Automotive Ethernet signifies an evolutionary leap, offering a dependable, adaptable, high-speed solution to cater to the data-intensive needs of today's modern vehicles. The automotive industry has started its transformative journey that allows boosted communication, diagnostics, infotainment, etc., by embracing Ethernet technology, typically associated with computer networks. We will explain the development of Ethernet in automotive applications, its applications, and advantages.
Evolution of Ethernet in Automotive Applications
Initial Phase: In the field of computer networking, the Ethernet technology was introduced in 1970s.The initial incorporation of this technology into the automotive industry commenced with the implementation of 100BASE-T1, delivering a 100 Mbps data rate over a single twisted pair.
Emergence of Automotive Ethernet: The introduction of Automotive Ethernet standards like BroadR-Reach, which enable 100 Mbps communication over unshielded single twisted pair cables, was driven by the rapid expansion of in-vehicle systems and the rising data requirements.
Standardization Efforts: The formation of the 802.3 Working Group by the IEEE was aimed at establishing standardized specifications for Automotive Ethernet, including protocols like 1000BASE-T1 designed for 1 Gbps communication. These standardized protocols foster interoperability and the widespread embrace of Automotive Ethernet technology.
Recent Developments: Present efforts are directed towards achieving multi-gigabit speeds, reaching up to 10 Gbps, and investigating Time-Sensitive Networking (TSN) for applications requiring real-time performance.
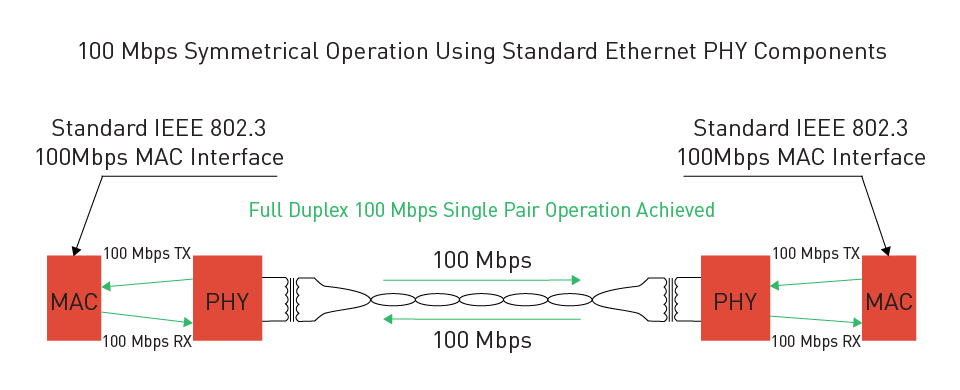
Figure 7: 100Mbps Ethernet Network Architecture
A single-pair or multiple-pair differential signal is known as Ethernet bus. MAC and PHY elements are present in Ethernet despite controller and transceiver present in case of CAN and LIN. An isolation transformer is used to isolate the signal from the PHY. It is done to further reduce common mode noise emission when unshielded cables are used, preventing unwanted damaging current loops between devices.
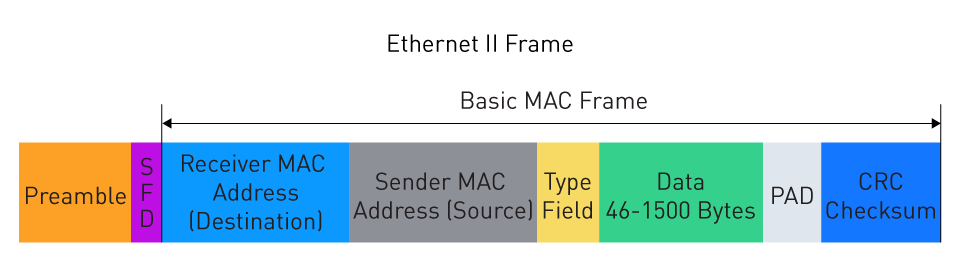
Figure 8: Typical Automotive Ethernet Frameii (Use Cases and Advantages of Automotive Ethernet)
Use Cases and Advantages of Automotive Ethernet
Use Cases
- Infotainment Systems: It allows high-bandwidth applications such as navigation, multimedia, and HD video streaming.
- Advanced Driver-Assistance Systems (ADAS): It facilitates real-time data processing needed for characteristics like lane-keeping and collision avoidance.
- Vehicle Diagnostics: Onboard and remote advanced diagnostic functionalities are facilitated by vehicle diagnostics.
- Integration of Sensors and Cameras: It plays a crucial role in connecting different cameras and sensors, important for autonomous driving.
Advantages
- High Bandwidth: To accommodate data-intensive applications, it provides speeds ranging from 100Mbps to 10Gbps.
- Cost-Efficiency: To lessen cost and weight, it uses unshielded twisted pair cables.
- Scalability: From low-speed body control to high-speed video and sensor data transmission, it adapts to multiple automotive needs.
- Interoperability: Compatibility across a broad spectrum of devices and systems is guaranteed by standardization.
- Robustness and Reliability: To guarantee resilient communication, it includes error detection and correction procedures.
- Support for Real-Time Communication: Standards such as TSN offer deterministic data transfer capabilities, making them well-suited for safety-critical applications.
Automotive Ethernet represents a transformative shift in how vehicles communicate, harnessing the inherent strengths of traditional Ethernet and customizing them to meet the distinctive requirements of today's automobiles. Its cost efficiency, adaptability, and high bandwidth make it a preferred option for progressive automotive designs for infotainment and autonomous driving systems.
The solidification of Automotive Ethernet's role as a cornerstone technology in the automotive industry results from the continual evolution of Ethernet standards and its seamless integration with other automotive networking protocols. Its adaptability ensures that it will remain a vital part of the automotive architecture in the foreseeable future. This adaptability aligns with emerging technologies, promoting the continued growth of intelligent, connected, and autonomous vehicles.
MOST (Media Oriented Systems Transport)
MOST (Media Oriented Systems Transport) technology stands as a specialized multimedia network and transport standard meticulously tailored for the enhancement of automotive infotainment systems. As MOST offers a robust and high-quality interface for audio, video, and control data, it becomes an integral element of the modern automotive landscape. In this section, we will give an introduction of MOST and explores its applications in infotainment systems, communication principles, and network topology.
Introduction and Applications in Infotainment Systems
Specifically built to manage the infotainment and multimedia needs within vehicles, MOST technology is a synchronous time-division multiplexing network. It is particularly created to transmit both control messages and data via a single physical channel.
Applications in Infotainment Systems:
- Audio and Video Streaming: MOST facilitates the instantaneous transmission of audio and video signals, enabling advanced features such as surround sound, HD Radio, and DVD playback.
- Navigation Systems: It boosts the merger of GPS navigation with multimedia operations.
- User Interfaces: It handles touchscreens, displays, and control elements within the vehicle.
- Integration with Mobile Devices: For features such as music streaming and hands-free calling, it allows seamless interfacing with smartphones and other devices.
Standards and Generations: MOST has progressed through multiple iterations, spanning from MOST25 and MOST50 to MOST150, with enhanced data rates and additional features in each generation.
Network Topology and Communication in MOST
A ring topology, where nodes are linked in a loop, is utilized by MOST. Depending on the configuration, data transmission via ring occurs in one or both directions.
- Nodes: It consists of amplifiers, display screens, heat unit, and other multimedia equipment.
- Channels: For a diverse range of data, including control, asynchronous, and isochronous channels, MOST defines separate platforms.
Figure 9: MOST Network Ring Topology
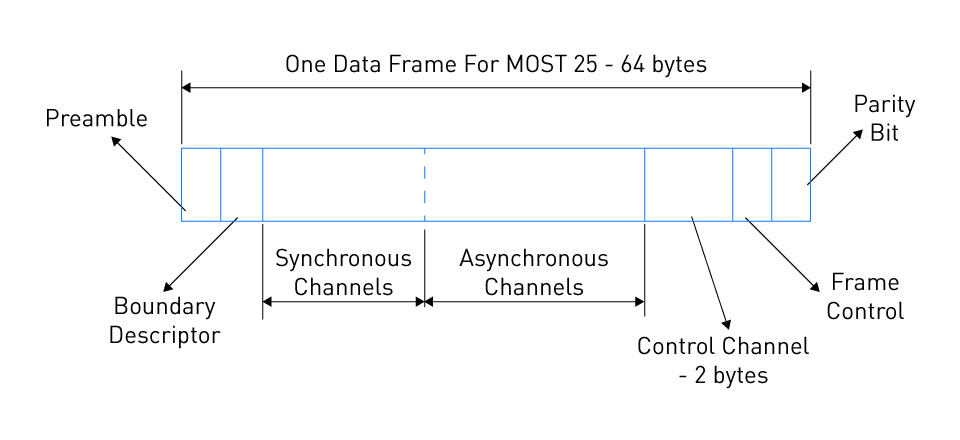
Figure 10: MOST25 Frame
Communication Principles
- Time-Division Multiplexing (TDM): Information is conveyed in segmented frames, and each segment is allocated to a particular transmitting node within the ring bus. With this method, nodes can use the full pace of the bus.
- Control and Synchronization: To maintain synchronization and allocation of bandwidth, a master node handles the network.
- Data Transport: It boosts various data types such as packet (asynchronous), streaming (isochronous), and control (synchronous).
Physical Layer: MOST can function across a range of physical layers, encompassing optical fibre (MOST25), electrical (MOST50), and coaxial (MOST150), each exhibiting unique features and applications.
Fault Tolerance and Reliability: Characteristics like fault rectification and repetitiveness guarantee robust functioning, and one node's failure does not impact the functionality of the others.
For automotive multimedia and infotainment systems, MOST technology provides greater fidelity and easy integration of multimedia applications within vehicles. For automotive manufacturers targeting to offer modern infotainment features, its unique design proves to be a progressive solution for managing real time audio, video, and control data.
MOST provide robustness and adaptability, helpful for multiple data types and physical transmission mediums due to its communication principles and network topology. The ongoing growth and seamless integration with various automotive networking technologies guarantee its continued flexibility and relevancy, effectively meeting the increasing requirements of contemporary automotive entertainment and information systems.
Comparison of Bus Systems
Complicated and multi-faceted communication between different subsystems is needed in the modern automotive landscape. These demands are fulfilled by multiple bus systems, each having specialized features. A comprehensive comparison among largely adopted bus systems such as LIN, Ethernet, MOST, CAN, and FlexRay with the direction to opt for the correct bus system for particular applications is explained in this section.
Summarizing Characteristics of CAN, LIN, FlexRay, Ethernet, and MOST
CAN (Controller Area Network)
- Data Rate: Up to 1Mbps
- Topology: A differential bus with terminating resistors on both ends
- Usage: Real-time control systems and critical sensor data
- Fault Tolerance: High resilience against noise and failures
- Complexity: Moderate complexity in terms of hardware and protocol
LIN (Local Interconnect Network)
- Data Rate: Up to 20kbps
- Topology: Single master/multiple slaves configuration, no termination resistors
- Usage: Non-critical systems like windows, mirrors, seats, etc.
- Fault Tolerance: Limited error checking and fault confinement
- Complexity: Low cost and simpler design
FlexRay
- Data Rate: Up to 10Mbps
- Topology: Hybrid; configured as a star or linear bus topology
- Usage: Time-critical applications; x-by-wire systems
- Fault Tolerance: Advanced error detection and fault containment
- Complexity: High; necessitates complex configuration and tuning
Automotive Ethernet
- Data Rate: 100Mbps to 1Gbps and more
- Topology: Star topology using switches
- Usage: High-bandwidth applications like ADAS, infotainment
- Fault Tolerance: Depends on implementation; generally robust
- Complexity: Moderate to high; more extensive wiring
MOST (Media Oriented Systems Transport)
- Data Rate: From 25Mbps (MOST25) to 150Mbps (MOST150)
- Topology: Ring topology
- Usage: Multimedia and infotainment systems
- Fault Tolerance: Designed for seamless multimedia transport
- Complexity: Tailored to handle multimedia; specific to infotainment
Selecting the Appropriate Bus System for Specific Applications
The choice of an ideal bus system depends on the specific requirements and limitations of the application.
Critical Control Systems: CAN and FlexRay may be suitable for applications needing real-time control and error rectification, with CAN frequently selected for lower demanding conditions and FlexRay for greater time-sensitive tasks.
Low-Cost and Non-critical Systems: In non-safety-critical realms, such as comfort functions, LIN is ideal.
High-Bandwidth and Advanced Systems: The need for greater bandwidth and complicated applications such as ADAS and connectivity solutions is filled by automotive Ethernet.
Multimedia and Infotainment: In order to fulfill the demanding needs of modern multimedia systems, providing synchronization and service quality, MOST is specifically designed.
Hybrid Solution: A combination of these systems along with the needed integration is frequently used by advanced vehicles. For instance, an amalgam of LIN with CAN is used as a cost-effective control option with a blend of critical and non-critical operations.
In building the current and future complicated automotive systems, an understanding of the different features, capabilities, and limitations of CAN, LIN, MOST, Ethernet, and FlexRay plays a critical role. Factors like complexity, cost, fault tolerance, data rate needs, and particular functionality are responsible for the optimal choice.
Some of the current bus systems may soon be replaced by the continuously evolving industry and emerging trends and technologies. To design and deploy the complex vehicular communication networks that advanced automobiles need, the engineers should be well-equipped. Hence, this must be ensured through continuous involvement with the latest developments in automotive networking.
直接登录
创建新帐号