Adaptive Cruise Control (ACC)
Compared to the traditional cruise control systems seen in older cars, adaptive cruise control, or ACC, is a major advancement. The way that ACC provides dynamic speed adjustments based on the surrounding environment is a prime example of how ADAS improves driving comfort and safety.
Operational Principle
The fundamental idea behind adaptive cruise control is to keep your car moving at a predetermined speed while automatically modifying it to keep a safe following distance behind the car in front of you. The ACC will keep the predetermined pace when the road ahead is clear. The ACC system will automatically lower the speed by applying the brakes or decelerating if it detects another vehicle traveling more slowly in the same lane. The car accelerates back to the predetermined speed when the path clears once more thanks to the ACC.
Components and Subsystems
Sensors: Sensors are the eyes of the system; they are essential for measuring distances and spotting cars. Primary sensors include cameras located on the windshield and radars, which are frequently found in the vehicle's front grille. For added precision, more sophisticated ACC systems might additionally use lidars and ultrasonic sensors.
Electronic Control Unit (ECU): The ACC Module, Engine Control Unit, Instrument Cluster, and Brake Control Module are the ECUs involved in the ACC functioning.
Actuators: These parts carry out the necessary functions, including opening the throttle or applying the brakes, when they get instructions from the Brake Control Module, the Engine Control Module, or, in the case of BEV vehicles, the Inverter.
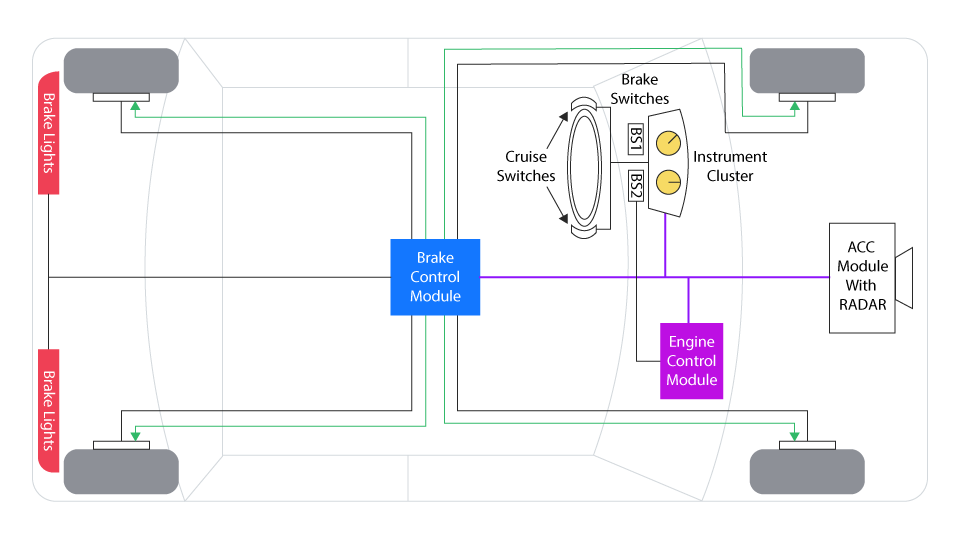
Figure 1: ACC System Components
Depending on the required rate of deceleration, the ACC system will either engage the brake system or reduce the throttle.
The ACC system modifies the throttle in order to accelerate and keep the vehicle moving at the intended pace.
Safety and Human Factors
Override Capability: Security is still the first priority. By applying the brakes or accelerator, drivers can override ACC at any time and maintain total control.
Human-Machine Interaction: ACC systems are fitted with visual and audio alarms to inform drivers about system engagements, disengagements, or failures.
Driving Behavior Analysis: Equipped with algorithms, advanced ACC systems keep an eye on driving habits, maybe spotting aggressive driving or driver exhaustion and reacting with the right interventions or alerts.
Limitations Awareness: It is necessary to inform drivers of the limitations of the technology. For example, the sensor's efficacy may be diminished in bad weather or low visibility, necessitating manual driver intervention.
The idea of ADAS technology is well embodied by ACC, which is a perfect blend of automation meant to support human drivers rather than replace them. The intricacy and dependability of ACC systems are anticipated to increase further as technology progresses, bringing us one step closer to a time when driving is entirely automated.




Lane Departure Warning and Keeping Assistance
A variety of ADAS technologies are designed to avoid unintended lane departures, which are a major contributing factor to numerous traffic accidents. Two complimentary systems in this suite are Lane Departure Warning (LDW) and Lane Keeping Assistance (LKA).
Operational Principle
Lane Departure Warning (LDW): This system uses cameras to identify lane markings to track the position of the vehicle within its lane. The LDW system notifies the driver by visual, aural, or haptic feedback when it detects an inadvertent lane departure (without the use of turn signals). Here, getting the driver to adjust the car's trajectory is the main objective.
Lane-Keeping Assistance (LKA): This technology goes beyond lane departure warnings (LDW) by detecting lane deviations and initiating remedial action. In the event that the system determines that the driver is not reacting to the initial warning, it will automatically re-center the car by applying differential braking or by steering the car back into its lane.
Components and Subsystems
Cameras: Usually installed behind the rearview mirror on the windshield, these cameras are calibrated to detect lane markers. Even more sophisticated systems are capable of distinguishing between painted lines, Botts' dots, and other kinds of lane markings.
Electronic Control Unit (ECU): ECUs The way that ECUs contribute to the operation of a system varies from car to car. These are, in general, the Instrument Cluster, the Body Control Unit, the Power Steering Module, the Autonomous Emergency Braking or Braking Control Module, the Powertrain Control Unit (or, in the case of BEVs, the Inverter), and the Lane Departure Warning/Keeping Assistance Unit.
Actuators: Actuators are essential to the LKA framework. They can use differential braking (Braking Control Module) or steering angle adjustment (Power Steering Module) to realign the vehicle inside its lane, depending on what is detected as a necessity.
In the example of Kia Stinger four functions are realized:
- Lane-Keeping Assistance (LKA): Using the camera image and vehicle signal information, the system is intended to assist in identifying the lane ahead and to emit a lane departure warning when the vehicle begins to move out of the lane.
- High Beam Assist (HBA): This feature turns on and off the high beam by detecting the head and tail lights of the car ahead of it.
- Intelligent Speed Limit Warning (ISLW): The Intelligent Speed Restriction Warning (ISLW) system uses the camera to identify traffic signs and the navigational map data to display the speed restriction.
- Forward Collision-Avoidance Assist (FCA): Forward Collision-Avoidance Assist (FCA) systems are supported.
Safety and Human Factors
Driver Engagement Monitoring: It's critical to make sure the driver stays engaged because these systems are semi-autonomous. Monitoring systems to identify driver inattention and remind them in different ways to remain attentive are part of advanced LDW and LKA setups. For instance, warning sounds being played, messages being displayed on the infotainment screen, haptic feedback like vibration or little steering wheel movement, or a combination of the aforementioned alerts. Given the semi-autonomous nature of these systems, it's crucial to ensure the driver remains engaged. Advanced LDW and LKA setups include monitoring systems to detect driver inattention, prompting them in various ways to stay vigilant. For example, flashing lights on the dashboard, playing warning sounds, haptic feedbacks such as vibration or subtle steering wheel movement, displaying messages on the infotainment screen or a combined alert of the previously mentioned.
System Limitations Education: Drivers should be informed about the restrictions of LDW and LKA, just like they should be with other ADAS capabilities. The efficiency of the system may be lowered by obscured lane lines in situations like snow or intense rain. Similarly, the system could not function as well in places where lane markers are faded.
Override Systems: Since safety is the top priority, drivers need to be able to override LKA interventions. A deliberate rotation of the steering wheel by the driver will override the system if it starts to steer the car back into the lane.
Feedback Balance: If there are too many false alarms, drivers may ignore them or switch the system off, which would lessen its effectiveness. It is crucial to calibrate the system for optimal sensitivity, which means that it should neither over-alert on little deviations nor ignore real departures.
In summation, LDW and LKA systems are excellent illustrations of how ADAS may significantly improve traffic safety. These innovations open the door to safer roads and fewer traffic fatalities by lowering the possibility of lane departure-related collisions. As with all ADAS features, though, it's crucial to strike a balance between automation and human control.
Autonomous Emergency Braking (AEB)
Autonomous Emergency Braking (AEB) is a key component of advanced driver-assistance systems (ADAS) and is a key technology that improves road safety. Its main responsibility is to recognize dangerous driving situations and automatically use the brakes to stop or lessen an accident. This section explores the components, human factors, and operational philosophy of AEB.
Operational Principle
The way autonomous emergency braking works is that it keeps an eye on the state of the road and the relative speed of the objects in front of the car. The system first sounds a warning to the driver in the event that it perceives a possible frontal collision scenario including another car, a pedestrian, or any other obstruction. The AEB system takes over and automatically applies the brakes to either avoid the crash or lessen its severity if the driver does not react appropriately within a set amount of time.
Typically, the operational algorithm is divided into two primary stages:
Risk Assessment: Determines the distance and relative speed between the car and the object ahead using sensor data. After that, it calculates the time to collision and determines whether braking is necessary.
Intervention: The AEB system applies the brakes, with the force varying according to speed, object size, and road conditions, if the risk assessment determines that the situation is critical.
Components and Subsystems
Sensors: For object identification and distance measurement, a combination of radars, cameras, and occasionally lidars are utilized.
Electronic Control Unit (ECU): The AEB function is either a stand-alone AEB module or is frequently integrated into the ESC (Electronic Stability Control) module. It communicates with various modules, including the Instrument Cluster and the Transmission Control Unit/Inverter.
Braking Actuators: After the decision to start braking has been taken, these are in charge of applying the required brake force. These actuators have a rapid response time and can apply the entire braking force.
Driver Trust: The system's efficacy depends on drivers having faith in AEB. This trust can be damaged by an overly sensitive AEB that sets off false warnings, which may cause drivers to turn off the feature.
Override Mechanisms: Having mechanisms that let the driver override the system is essential for both safety and legal reasons. This is especially true if the driver believes that braking is not necessary or could result in another kind of accident, like being rear-ended.
User Education: To avoid relying too much on the technology, drivers need to be made aware of the system's limits, such as its inability to function completely in bad weather or at high speeds.
Regulatory Compliance: In order to be approved for usage, AEB systems must satisfy strict regulatory standards pertaining to performance, dependability, and safety.
Through the integration of sophisticated sensing technology and intricate algorithms, Autonomous Emergency Braking considerably enhances traffic safety. To be widely adopted and effective, this crucial ADAS function must strike a delicate balance between automation and driver control, as well as human aspects like trust and attentiveness.
Other ADAS Features
The ever-evolving advanced driver-assistance systems (ADAS) provide a wide range of features that improve driver safety, convenience, and overall driving experience. Although ADAS talk mostly focuses on Adaptive Cruise Control, Lane Departure Warning, and Autonomous Emergency Braking, there are a few more critical aspects that should also be considered. Three such technologies—traffic sign recognition, blind spot monitoring, and parking assistance—will be discussed in this section.
Traffic Sign Recognition (TSR)
Operational Principle
Real-time detection, identification, and notification of traffic signs to vehicles is achieved by traffic sign recognition systems using cameras. The main objective is to make sure that drivers don't overlook important information on traffic signs, such as speed restrictions and forbidden activities.
Components and Subsystems
- Camera Systems: To take pictures of the road ahead, a forward-facing camera is usually installed on the windshield.
- Image Processing Algorithms: These algorithms identify signs by their content, shape, and color before grouping them into identifiable groups.
- Human-Machine Interface (HMI): Upon recognition, the system provides the driver with a reference by displaying the sign information on the dashboard or head-up display (HUD).
Safety and Human Factors
It is essential to make sure the system recognizes and understands indications accurately under a variety of environmental situations (such as rain, fog, or low light). Inaccuracies could cause drivers to make ignorant decisions, which emphasizes how crucial system dependability is.
Blind Spot Monitoring (BSM)
Operational Principle
Blind Spot Monitoring devices help drivers decide which lanes to change by warning them of any cars or obstructions in their blind zones.
Components and Subsystems
- Sensors: Cars or objects in the car's blind zones are detected by radars or ultrasonic sensors, which are usually mounted on side mirrors or rear bumpers.
- Warning Systems: When a car approaches the driver's blind area, the driver is alerted via aural alerts and visual signs on the side mirrors.
Safety and Human Factors
It is imperative to guarantee prompt and precise notifications in order to avert possible crashes when changing lanes. In addition, it's critical to prevent false positives in order to keep drivers confident in the system.
Parking Assistance
Operational Principle
Parking assistance systems assist drivers by taking over steering control or by offering visual cues in parallel, perpendicular, or angled parking circumstances.
Components and Subsystems
- Sensors: Positioned all around the car, ultrasonic sensors and cameras work together to assess distances and identify impediments.
- Control Algorithms: These programs analyze sensor data to produce recommendations for steering and movement or to operate the car on its own while it is parked.
- Display Systems: They show prospective parking trajectories and the environment around the car visually.
Safety and Human Factors
The effectiveness of parking assistance technologies is largely dependent on user trust. The system's capacity to maneuver in confined spaces without causing collisions must be trusted by drivers. Furthermore, even while technology helps with parking, drivers still need to pay attention and be accountable for the security of their cars.
In summary, driving experiences change from being primarily manual tasks to ones where drivers and intelligent systems work together as ADAS technologies advance. These "other" characteristics, which integrate technology and human variables in complex and revolutionary ways, may not receive as much attention as they should, but they are just as important in defining this new era of driving.
直接登录
创建新帐号