Fundamentals of Adaptive Control
Adaptive control is a dynamic approach to control system design in which parameters are adjusted in real-time to accommodate changes in the system or the environment in which it functions. Adaptive control systems are made to continuously alter their behavior in response to changing conditions, uncertainties, or disturbances that were not specifically taken into consideration during the design phase. This is in contrast to traditional control systems, where the controller's parameters are fixed and tuned based on a predefined model.
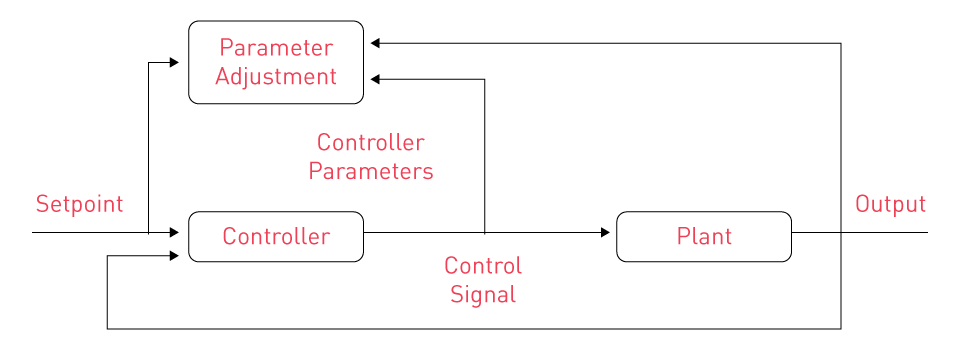
Figure 1: Block diagram of adaptive control system
Key Concepts in Adaptive Control
Adaptation Mechanism: An adaptive control system's primary characteristic is its capacity for self-adjusting parameters. Usually, an adaptation mechanism that monitors the system's performance and modifies the controller parameters as required manages this. Adaptive control systems can be conveniently thought of as having two loops: a parameter adjustment loop and a normal feedback loop that involves the process and the controller. As the system or environment changes, adaptation enables the controller to maintain or enhance performance.
Modeling and Estimation: Adaptive control often relies on estimating system parameters or states in real time. Adaptive controllers employ real-time data to estimate important parameters because the precise model of the system may not be fully known or may vary over time. The control laws are then dynamically modified using these estimates. This procedure, sometimes referred to as parameter adaptation or estimation, is essential to the adaptive control system's effective operation. Regression models and least squares are two estimation techniques.
Adaptation Laws: Specific adaptation laws regulate the adaptation process in adaptive control systems, dictating how the controller parameters ought to be modified in response to the system's observed performance. These laws, which guarantee that the system stays stable and converges to the desired performance, are generated using a variety of techniques, including gradient descent methods and Lyapunov stability theory.
Stability and Convergence: Maintaining the system's stability while it adjusts to changing conditions is one of the primary challenges in adaptive control. Adaptive controllers that ensure system stability during adaptation are frequently designed using stability theory, especially Lyapunov's direct method. Furthermore, the adaptive algorithm's convergence features are crucial to guaranteeing that the controller parameters settle to their ideal values and that system performance gradually improves.
Importance of Adaptive Control in Power Electronics
Adaptive control is especially advantageous in power electronics, where systems frequently operate under changing conditions, such as variations in load, supply voltage, or temperature. Traditional fixed-parameter controllers might find it difficult to continue operating at their best under these fluctuating conditions, which could result in instability or inefficiencies. On the other hand, adaptive controllers are able to adapt to these changes in real time, guaranteeing that the power conversion process stays reliable, stable, and efficient.
An adaptive controller, for example, can instantly modify the duty cycle or switching frequency of a DC/DC converter running under variable load conditions to preserve a steady output voltage and reduce energy losses. In applications like renewable energy systems, where input conditions (such as solar irradiance in photovoltaic systems) vary considerably and unpredictably, this flexibility is essential.
Advantages and Applications
Adaptive control's main benefit is its capacity to manage uncertainties and shifts in system dynamics without necessitating manual controller retuning. Because of this, adaptive control is ideal for systems with uncertain operating conditions or a relatively unfamiliar system model. Adaptive control techniques in power electronics are being used more and more in applications including motor drives, power converters, and renewable energy systems because they improve performance, resilience, and efficiency.
However, the design and implementation of adaptive control systems can be difficult, necessitating a thorough understanding of system dynamics, control theory, and real-time computation. Furthermore, maintaining stability and resilience throughout the adaptation process remains a significant challenge.
Types of Adaptive Control Systems
Adaptive control systems are designed to adapt their parameters in real time to accommodate changes in system dynamics or external disruptions.
There are two methods of adaptive control techniques: direct and indirect. The methods differ in how they employ estimated parameters. Estimated parameters are used directly in the adaptive controller in direct adaptive control. Indirect adaptive control determines the necessary controller parameters based on the estimated parameters.
There have been several types of adaptive control systems developed, each with its own set of adaptation and control techniques. Model Reference Adaptive Control (MRAC), Self-Tuning Regulators (STR), and other specific adaptive control systems are among the most commonly used. Each type has advantages and disadvantages, especially in the field of power electronics, where system conditions might change dramatically.
Model Reference Adaptive Control (MRAC)
Model Reference Adaptive Control (MRAC) is a popular direct adaptive control method where a reference model defines the system's desired behavior. To ensure that the system's output closely resembles the reference model's output, the controller is made to dynamically modify its parameters. Under nominal conditions, the reference model represents the system's ideal response.
The discrepancy (error) between the reference model output and the actual system output drives the adaptation process in MRAC. Over time, the controller's parameters are changed to reduce this error. The following equation provides the model error with reference to Figure X:
$$ e = y - y_m $$The parameter adjustments are governed by adaptation laws, which are usually taken from stability theories such as Lyapunov's method. This keeps the system stable while enhancing its performance.
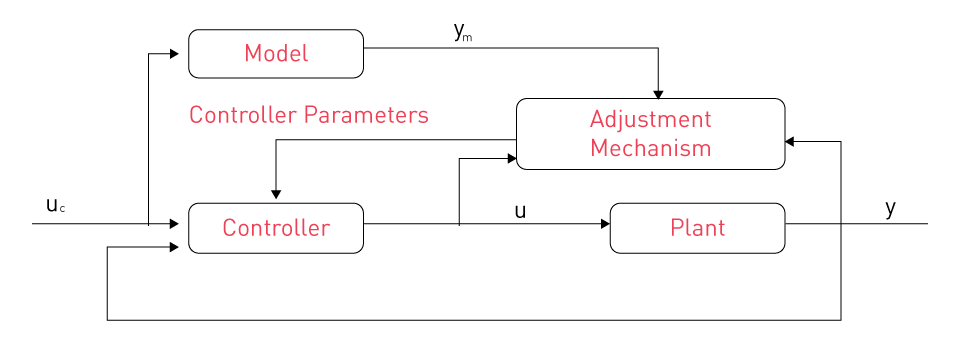
Figure 2: Block diagram of model reference adaptive control system
MRAC is especially useful in power electronics applications like motor drives and power converters, where system parameters like load or supply voltage can vary significantly. For example, in a motor drive system, an MRAC controller can adapt to changes in load torque, ensuring optimal performance without the need for manual retuning.
Advantages:
- Guarantees that the system's output closely resembles the desired performance.
- Resilient to changes in the dynamics of the system.
- Suitable for systems with clearly specified reference models.
Challenges:
- Needs a well-defined and precise reference model.
- Complexity in developing adaptation laws that assure stability.
Self-Tuning Regulators (STR)
Self-Tuning Regulators (STRs) are indirect adaptive controllers that alter their settings depending on real-time system dynamics estimation. Unlike MRAC, which relies on the reference model to determine adaptation, STR systems directly detect and change system model parameters. These factors are then used to change the control law, resulting in optimal system performance.
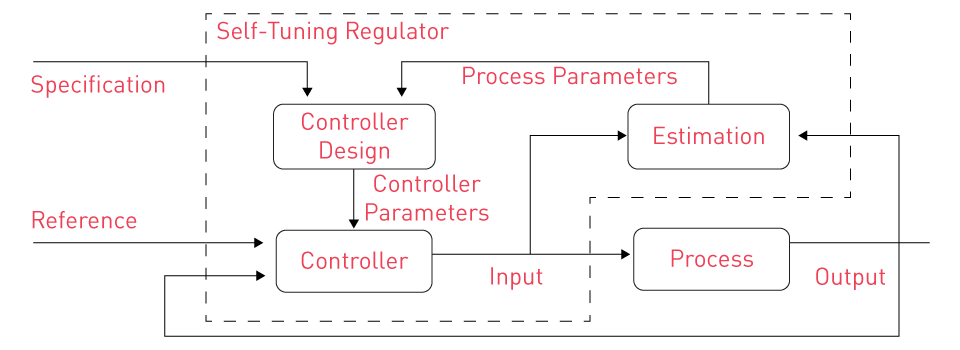
Figure 3: Block diagram of self-tuning regulator
In STR, the controller begins with an initial set of parameters based on the system's nominal model. As the system runs, an online identification procedure estimates the current system parameters, such as time constants, gains, and delays. The control law is then updated depending on the estimated parameters, essentially tweaking the controller in real-time to respond to changing conditions.
STR is commonly employed in applications where system parameters are variable or difficult to model precisely. For example, in a DC/DC converter where the load varies unpredictably, an STR can modify the control parameters to maintain a constant output voltage.
Advantages:
- Can work with systems that have uncertain or time-varying parameters.
- Flexibility in adjusting to a variety of operating conditions.
- No predefined reference model is required.
Challenges:
- Real-time parameter estimation can be computationally complex.
- Careful design is required to assure the control system's convergence and stability.
Gain Scheduling
Gain Scheduling is a practical technique for adaptive control in which controller parameters are modified in response to predetermined operating conditions or schedules. Instead of continuous adaptation, the system alternates between various sets of controller gains based on the current operating point.
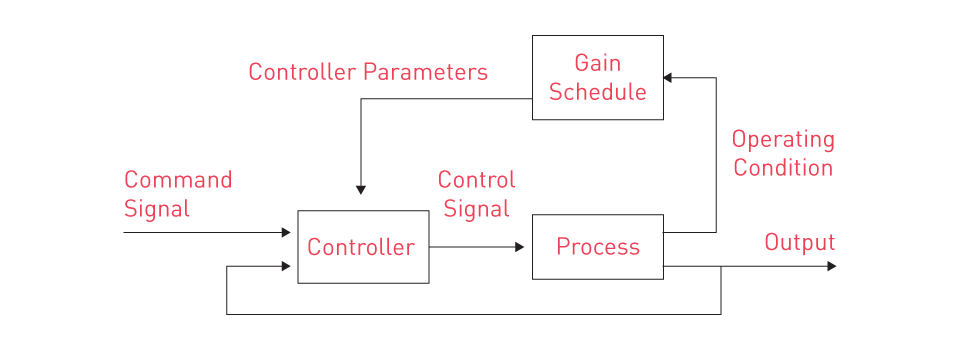
Figure 4: Block diagram of control system with gain scheduling
A gain scheduling system divides its operating range into many areas, each with its own set of controller parameters. When the system's operating conditions change (for example, speed, load, or temperature), the controller selects the appropriate set of parameters from the schedule. This method enables a piecewise-linear approximation of the control law, resulting in adaptability without the complexity of continuous parameter modification. Gain scheduling can be accomplished as either a table lookup or a function.
Gain scheduling is widely utilized in aerospace applications, such as managing aircraft flight dynamics, where system dynamics vary dramatically between flight conditions. In power electronics, it can be utilized in applications such as variable speed motor drives, where the control strategy must change depending on the motor's speed and load.
Advantages:
- Implementation is simpler than continuous adaptive control.
- Effective for systems with clearly defined regions for operation.
- Reduces computing load by avoiding continuous adaptation.
Challenges:
- Requires precise understanding of the system's operational conditions and transitions between them.
- Performance degradation may occur near the boundaries between scheduled gains.
Adaptive Backstepping Control
A more advanced adaptive control strategy that works especially well for nonlinear systems is adaptive backstepping. With this approach, the controller is constructed step-by-step, with each stage concentrating on stabilizing a particular aspect of the dynamics of the system. During this phase, the adaptive element is introduced by estimating the unknown system parameters.
The system is broken down into a number of smaller systems, each with its own control law, in adaptive backstepping. Then, by "backstepping" through these subsystems, the overall control law is created, guaranteeing that the system stays stable at every stage. The adaptation mechanism enhances the controller's capacity to manage uncertainties and nonlinearities by updating the control parameters in real-time in response to the behavior of the system.
Power electronics applications involving highly nonlinear systems, like inverters or converters with nonlinear loads or switching characteristics, benefit greatly from this technique. It offers a strong control approach that preserves stability and performance across a variety of operating conditions.
Advantages:
- Effective in nonlinear, complex systems.
- Offers a methodical way to construct adaptive controllers.
- Capable of managing a variety of uncertainties and disruptions.
Challenges:
- Design and implementation are complex tasks.
- The requirement for real-time parameter estimation and nonlinear control rule computing makes it computationally intensive.
Application of Adaptive Control in Power Electronics
The need for systems that can function efficiently and reliably in a variety of conditions has made adaptive control techniques in the field of power electronics more and more important. Dynamic variations in load, input voltage, temperature, and other environmental conditions are common in power electronic systems, such as motor drives, converters, and inverters. Traditional fixed-parameter controllers might not be able to maintain operating at their optimal performance in these shifting conditions, which could result in instability, decreased reliability, or inefficiencies. An effective solution for these issues is adaptive control, which can modify control parameters in real time.
Adaptive Control in DC/DC Converters
DC/DC converters are essential parts of power electronics and are utilized in a wide range of applications, from portable electronics to renewable energy systems. A DC/DC converter's performance is significantly affected by fluctuating input voltage and changing load conditions. To manage these fluctuations and guarantee that the converter operates as efficiently as possible while maintaining a steady output, regardless of changing conditions, adaptive control techniques are very effective.
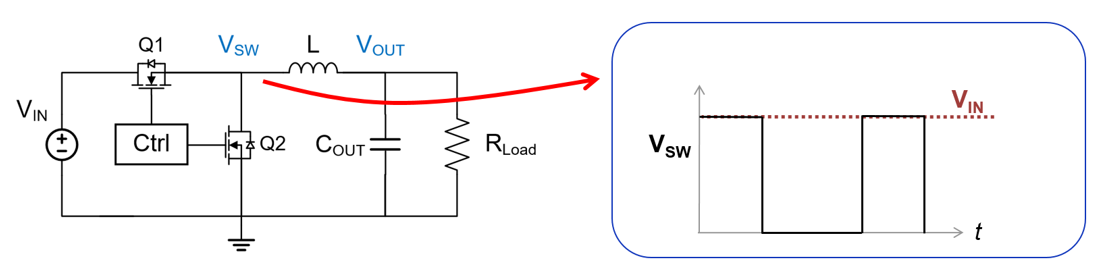
Application Example: An adaptive controller can dynamically modify the duty cycle in a buck converter, which lowers the output DC voltage, to keep the output voltage steady even when the load or input voltage varies. This is essential for applications like as battery-powered gadgets, where the input voltage may drop as the battery drains, or renewable energy systems, where the input conditions might vary significantly (e.g., solar panels under changing sunlight conditions).
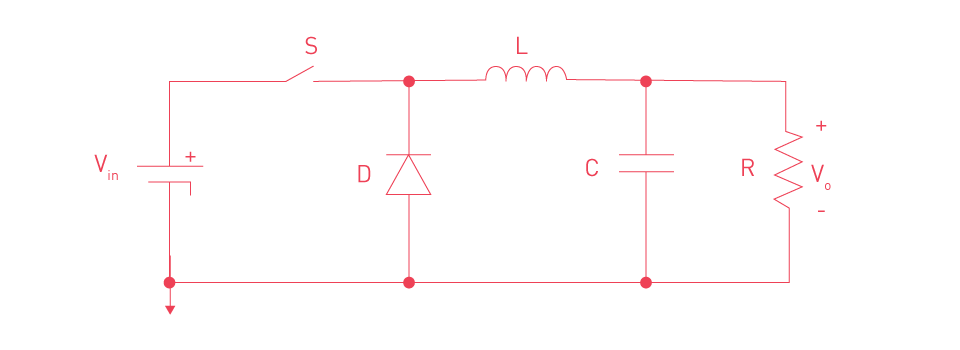
Figure 5: Buck converter circuit
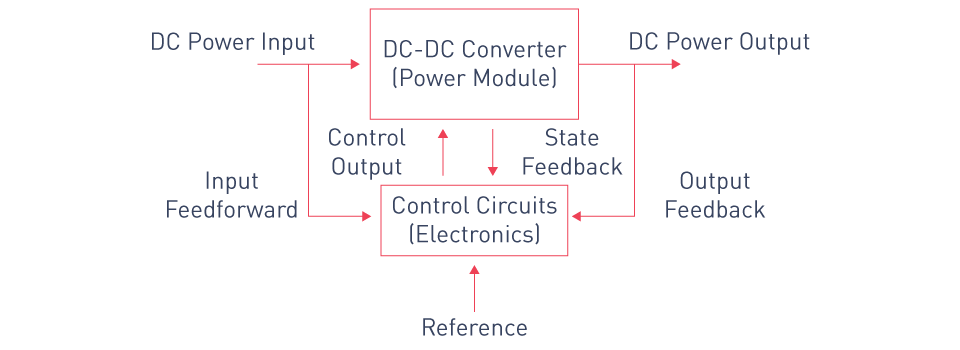
Figure 6: Generic controlled DC/DC converter
Benefits: DC/DC converters that employ adaptive control provide higher robustness against disturbances, lower energy losses, and increased efficiency. In order to further maximize performance, it also enables the converter to adjust to various operating modes, such as switching between continuous and discontinuous conduction modes.
Adaptive Control in Inverters for Renewable Energy Systems
Inverters play a crucial role in transforming DC electricity from renewable energy sources, such wind turbines and solar panels, into AC power that can be sent into the electrical grid or utilized in homes and businesses. Maintaining steady and efficient inverter functioning is severely hampered by the unpredictability of renewable energy sources. Inverters can effectively respond to these issues because of adaptive control methods.
Application Example: Maximum Power Point Tracking (MPPT), which continuously modifies the operating point of the solar panels to optimize power output under fluctuating sunlight conditions, can be implemented in a grid-tied solar inverter using adaptive control. Adaptive control can also assist the inverter to compensate for variations in input power and load while keeping it in sync with the grid.
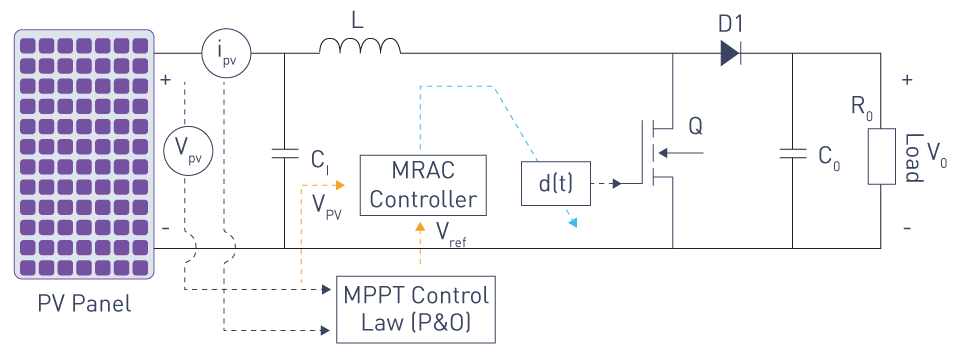
Figure 7: Adaptive MPPT controller
Benefits: In addition to improving power quality and energy conversion efficiency, adaptive control makes sure the inverter can withstand abrupt fluctuations in input power without becoming unstable. This is especially crucial for preserving grid stability and optimizing the return on investment for installations of renewable energy.
Adaptive Control in Motor Drives
Another crucial area in which adaptive control is used in power electronics is motor drives. Motors frequently operate at different loads and speeds in a variety of consumer, automotive, and industrial applications. These variances may be too much for traditional control techniques to manage, resulting in inefficiencies or the requirement for human retuning. Motor drives can automatically modify their control parameters to maintain peak performance because of adaptive control techniques.
Application Example: The motor drive system of an electric vehicle must adjust to shifting load conditions, including topographical variations, acceleration, and deceleration. To maximize efficiency and performance in these different conditions, an adaptive controller can dynamically modify the motor's torque and speed control parameters.
Benefits: Motor drives can operate more smoothly, efficiently, and with less energy consumption by utilizing adaptive control. This prolongs the motor's lifespan by lowering wear and tear and improving the electric vehicle's performance and range.
Adaptive Control in Power Management Systems
The efficient and reliable distribution of power inside an electronic system is the responsibility of power management systems. These systems frequently have to control several loads and power sources, necessitating a high level of adaptability and flexibility. This task is ideally suited for adaptive control techniques, which allow the power management system to respond in real-time to changing supply conditions and power demands.
Application Example: The power management system of a modern smartphone must regulate battery charge and distribute power evenly across the processor, display, sensors, and communication modules. Performance and battery life can be maximized with an adaptive control system that can dynamically modify power distribution based on current usage patterns and battery conditions.
Benefits: Longer battery life, better energy efficiency, and improved user experience are all results of adaptive control in power management systems. Additionally, it makes more advanced power-saving techniques possible, such as dynamic voltage and frequency scaling (DVFS), which prolongs the battery life of portable gadgets.
Adaptive Control in Power Quality Improvement
In power electronics, power quality is a major challenge, particularly in devices that are connected to the electrical grid. Challenges including flicker, harmonic distortion, and voltage sags can lead to poor power quality, which can impair the functionality of delicate electronic devices. Power quality can be enhanced by using adaptive control techniques, which dynamically compensate for these disruptions.
Application Example: Adaptive control in a dynamic voltage restorer (DVR) can identify voltage sags and quickly modify the compensation voltage to bring the supply voltage back to its nominal level. This is important in industrial settings because voltage sags can harm equipment or interrupt manufacturing processes.
Benefits: Power quality devices that utilize adaptive control offer rapid and effective power disturbance compensation, enhancing the reliability and lifespan of electronic devices. Additionally, it helps in maintaining adherence to power quality standards, which is crucial for both commercial and industrial power users.
Challenges and Solutions in Implementing Adaptive Control Systems
In power electronics, where operating conditions can fluctuate significantly, adaptive control systems are especially advantageous for managing dynamic and uncertain environments. Nevertheless, there are certain challenges in implementing adaptive control systems. These challenges cover a wide range of issues, such as robustness, real-time performance, stability, computational complexity, and integrating adaptive systems with existing infrastructure. The primary challenges in implementing adaptive control systems are explored in this section, along with a few techniques for addressing them.
Stability and Convergence Issues
Challenge: Making sure the system stays stable while it modifies its parameters in real-time is one of the biggest challenges in adaptive control. Adaptive systems constantly update their control laws based on real-time data, in contrast to classic control systems with fixed parameters. If the adaptation process is not well planned, this could result in instability. A crucial issue is making sure the system's parameters settle to the right values without producing oscillations or diverging behavior.
Solution: Stability can be addressed by carefully designing adaptation laws based on stability theories like Lyapunov's direct method, or by employing robust adaptive control techniques. Lyapunov-based techniques guarantee that the adaptation process is inherently stable, ensuring that the system's performance either stays constant or increases over time. Furthermore, excessive control parameter changes can be avoided by employing fixed parameter updates or adaptive gain limitations, which lowers the danger of instability.
Computational Complexity
Challenge: Adaptive control algorithms can be computationally challenging, especially when working with complex systems that need to adjust in real time. The system's computational resources can be subjected to heavy demands when estimating parameters, updating control laws, and guaranteeing stability in real-time. This computational burden can pose a significant barrier in embedded systems or applications with constrained processing power.
Solution: There are various strategies that can be used to control computational complexity. One strategy is to employ reduced-order adaptive controllers or simpler models, which capture the key dynamics of the system without requiring a lot of computation. Another strategy is to use specialized hardware, like Field-Programmable Gate Arrays (FPGAs) or Digital Signal Processors (DSPs), which are designed for real-time processing, to implement adaptive algorithms. Furthermore, adaptive control systems can be made to function hierarchically, with more complex adaptive algorithms operating at lower rates or during less crucial times while simpler, faster control loops handle immediate responses.
Real-Time Performance and Delays
Challenge: The ability to respond swiftly to system or environmental changes is essential in adaptive control systems. However, delays in the adaptation process can impair system performance and cause instability, whether they are brought on by communication delays, sensor lag, or computational latency. Real-time performance is especially important in power electronics, where rapid dynamics necessitate immediate control actions.
Solution: Optimizing the system's software and hardware is crucial for reducing delays in adaptive control systems. High-speed communication protocols should be implemented to minimize data transmission delays, and rapid and efficient algorithms should be employed to lower computing latency. Furthermore, adaptive control and predictive control techniques can be integrated to predict changes and modify control parameters proactively as opposed to reactively. Maintaining real-time performance also requires making sure that the sampling rate and control update rate are high enough in relation to the system dynamics.
Robustness to Noise and Disturbances
Challenge: Adaptive control systems need to be resilient to noise, model uncertainties, and external disturbances. Sensor readings and control signals in power electronics can be impacted by noise from switching elements, external electromagnetic interference, and other sources. This could result in inaccurate parameter updates and decreased system performance.
Solution: Filtering techniques can be used to reduce the effect of noise on control signals and parameter estimation, increasing robustness. For instance, by taking into consideration the noise characteristics, Kalman filters can be utilized to generate state and parameter estimations that are more accurate. Furthermore, to guarantee that the system maintains stability and performs well even in the face of substantial uncertainties and disruptions, robust adaptive control techniques like sliding mode adaptive control or H-infinity adaptive control can be used.
Integration with Existing Systems
Challenge: It might be difficult to integrate legacy hardware and software when implementing adaptive control in existing systems. Implementation can be made more difficult by compatibility issues, disparities in communication protocols, and the requirement to modify existing control loops. Furthermore, it might be necessary for adaptive control systems and traditional control strategies to coexist, necessitating careful coordination.
Solution: Adaptive control systems can be designed as modular add-ons that connect with existing control loops without requiring significant modifications to the infrastructure in order simplify integration. Compatibility with legacy systems can be ensured by using common communication protocols and interfaces. Moreover, until the adaptive system is completely verified and reliable, it can be implemented gradually, beginning with non-critical subsystems or operating parallel with traditional control methods. By using a phased implementation strategy, risk is decreased and small enhancements can be made without interfering with ongoing operations.
Ensuring Long-Term Reliability
Challenge: Adaptive control systems must exhibit long-term reliability, especially when utilized in safety-critical applications like power electronics in industrial or automotive settings. Although it helps manage changing conditions, the continuous adaptation process can eventually cause unforeseen issues or wear and tear on components.
Solution: Long-term reliability can be improved through rigorous testing and validation procedures, such as extensive simulations, hardware-in-the-loop testing, and field tests under a variety of operating conditions. Furthermore, small issues can be kept from progressing into major issues by implementing safeguards like monitoring systems that identify and address performance deviations. To guarantee that the system can continue to operate safely even in the case of an adaptive control loop failure, redundancy and fail-safe methods should also be incorporated.
直接登录
创建新帐号